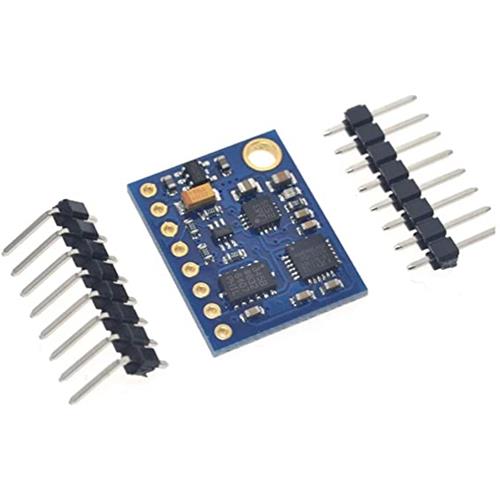
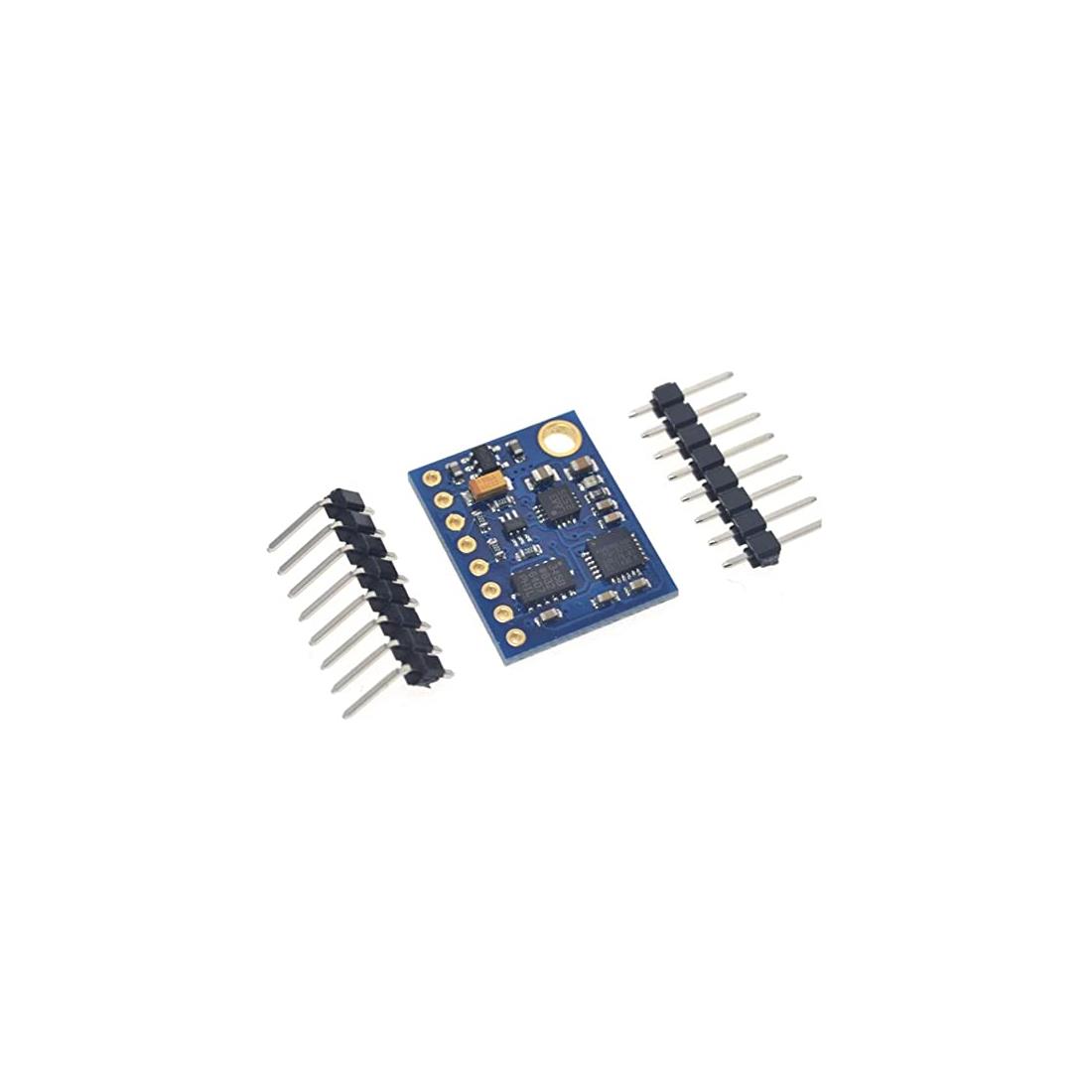
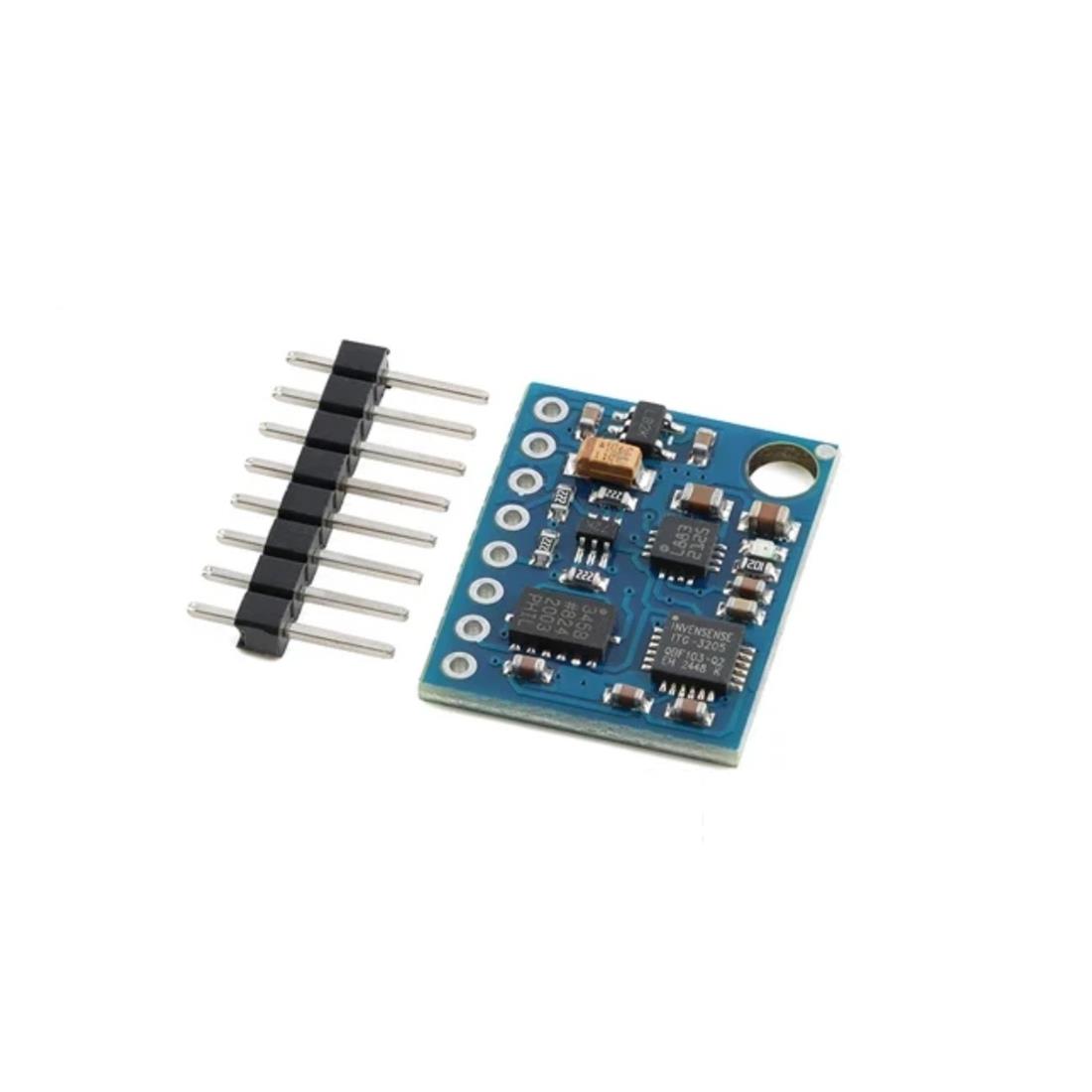
Módulo GY-85 que integra tres sensores de movimiento en una sola placa: acelerómetro de 3 ejes (ADXL345), giroscopio de 3 ejes (ITG3205) y magnetómetro de 3 ejes (HMC5883L). Esta combinación proporciona 9 grados de libertad (9DOF), permitiendo medir aceleración lineal, velocidad angular y campo magnético terrestre. Es ideal para proyectos de navegación inercial, drones, robots, sistemas de posicionamiento, balanceo de plataformas y realidad virtual. La comunicación se realiza mediante protocolo I2C, con niveles lógicos compatibles de 3V a 5V gracias al circuito de conversión de nivel integrado (LLC) .
Especificaciones técnicas:
• Modelo: GY-85
• Chips integrados: ADXL345 (acelerómetro 3 ejes), ITG3205 (giroscopio 3 ejes), HMC5883L (magnetómetro 3 ejes)
• Grados de libertad: 9DOF (3 acelerómetro + 3 giroscopio + 3 magnetómetro)
• Voltaje alimentación: 3V – 5V DC (compatible con 3.3V y 5V)
• Comunicación: I2C (IIC)
• Direcciones I2C: ADXL345: 0x53, ITG3205: 0x68, HMC5883L: 0x1E
• Conversor nivel lógico: Integrado (LLC), compatible con sistemas 3V-5V
• Dimensiones: Aprox. 22 x 17 mm
• Peso: Aprox. 2g
• Acabado PCB: Oro bañado (immersion gold)
• Temperatura operativa: -40°C a +85°C
• Pines: VCC, GND, SDA, SCL, XDA, XCL (6 pines)
• Aplicaciones: Dron cuadricóptero, robot con balance, sistema de navegación inercial (INS), brújula digital, plataforma estabilizadora, realidad virtual, seguimiento de movimiento, Arduino, Raspberry Pi
Conexión típica con Arduino:
• GY-85 VCC ? Arduino 5V (o 3.3V)
• GY-85 GND ? Arduino GND
• GY-85 SDA ? Arduino SDA (A4 en Uno/Nano, D2 en algunos modelos de ESP)
• GY-85 SCL ? Arduino SCL (A5 en Uno/Nano, D3 en algunos modelos de ESP)
• Los pines XDA y XCL son auxiliares para conectar sensores I2C adicionales en cadena (daisy chain)
Pines del módulo:
• VCC: Alimentación positiva (3V-5V)
• GND: Tierra
• SDA: Línea de datos I2C
• SCL: Línea de reloj I2C
• XDA: Línea de datos auxiliar (para conectar sensores I2C adicionales)
• XCL: Línea de reloj auxiliar (para conectar sensores I2C adicionales)
Capacidades de cada sensor:
• Acelerómetro (ADXL345):
• Rango seleccionable: ±2g, ±4g, ±8g, ±16g
• Resolución: 13 bits (hasta 3.9mg/LSB)
• Ideal para medir inclinación y aceleración lineal
• Giroscopio (ITG3205):
• Rango fijo: ±2000°/segundo
• Sensibilidad: 14.375 LSB por °/s
• Ideal para medir velocidad angular (rotación)
• Magnetómetro (HMC5883L):
• Rango: ±1.3 a ±8 Gauss (seleccionable)
• Resolución típica: 5 miligauss
• Ideal para funcionar como brújula digital
Características destacadas:
• 9 grados de libertad en una sola placa: Combina los tres sensores necesarios para seguimiento completo de orientación
• Conversión de nivel integrada: Acepta tanto 3.3V como 5V, compatible con casi todos los microcontroladores
• Comunicación I2C compartida: Los tres sensores se comunican por el mismo bus, ahorrando pines del microcontrolador
• Compacto y ligero: Solo 2g, ideal para drones y proyectos con restricciones de peso
• Múltiples aplicaciones: Desde brújula digital hasta sistemas de navegación inercial completos
• Detección de campos magnéticos: Permite orientación absoluta respecto al norte magnético
Librerías recomendadas:
• GY-85 library por madc (GitHub) – Arduino implementation completa para los tres sensores
• Adafruit_ADXL345 – Librería oficial para el acelerómetro
• ITG3200 library – Para el giroscopio
• HMC5883L library – Para el magnetómetro (brújula)
• Wire.h – Librería estándar I2C de Arduino
Aplicaciones típicas:
• Navegación inercial (INS): Combinando datos de acelerómetro y giroscopio con filtro de Kalman para estimar posición y orientación
• Brújula digital: Usando solo el magnetómetro para determinar dirección norte
• Estabilización de plataformas: Para gimbals o cámaras estabilizadas
• Control de drones: Para mantener vuelo estable y registrar ángulos de inclinación
• Robótica móvil: Para seguimiento de orientación y detección de colisiones por aceleración
• Sistemas de navegación para vehículos terrestres: Complementando datos de GPS cuando la señal es débil
Consideraciones importantes:
• Calibración necesaria: El magnetómetro HMC5883L requiere calibración para compensar interferencias del entorno (hard-iron y soft-iron). Sin calibración, la brújula puede tener errores significativos.
• Filtrado de ruido: Los sensores pueden mostrar ruido en las lecturas. Aplicar filtros complementarios o filtros de Kalman para obtener datos más estables.
• Limitación de GY-85: Algunas implementaciones reportan que este módulo tiene limitaciones en aplicaciones de navegación inercial de alta precisión, siendo superado por módulos más modernos como MPU9250.
• Sujeción firme: Vibraciones mecánicas afectan la precisión del sensor; montar el módulo de forma segura en el chasis del proyecto.
• Interferencias magnéticas: Fuentes cercanas de campos magnéticos (motores, cables con corriente, imanes) alteran las lecturas del magnetómetro.
• Variantes del chip magnetómetro: Algunas versiones del GY-85 pueden incluir QMC5883L en lugar de HMC5883L. Son compatibles pero requieren librerías diferentes.































{kind=link}